Binarization
The conversion of a gray scale image into black or white, so called binary image is called binarization. The simplest way of binarization is thresholding; setting pixels to white (or 1) if the gray value is equal or greater than the threshold or setting to black (0) if smaller. When using adaptive thresholding, the level of threshold is determined automatically based on the content of the image or image sequence. A well-established way of automatic threshold determination is Otsu’s method. An alternative method is using a given percentile of the intensity histogram as threshold value. In contrast locally adaptive thresholding uses a level that varies object by object in the image. This can distinguish bright spots, shapes over varying background.
Examples are shown for adaptive and locally adaptive thresholding of an image with uneven background (for more details see Workflow/Thresholding):
| Gray scale image to be thresholded and its cross-section intensities along the indicated ROI | |
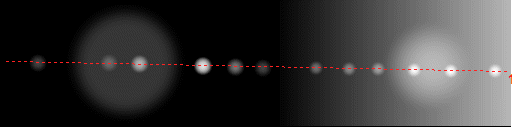 |
 |
| Test image (saved as 16bit TIF). | |
| Unifrom thresholding (from the bottom) | |
 |
 |
| Binarized image | |
| Locally adaptive thresholding (from the top) | |
 |
 illustration illustration |
| Binarized image. Right: green dots indicate local maxima | |
Preparation of images for binarization:
However the above illustrated locally adaptive thresholding
technique (![]() Threshold
/Threshold from local max/min=Bound
Maxima uniformly) powerfully suppresses effects of
inhomogeneous background, it is often beneficial to pre-process
images before binarization:
Threshold
/Threshold from local max/min=Bound
Maxima uniformly) powerfully suppresses effects of
inhomogeneous background, it is often beneficial to pre-process
images before binarization:
Segmentation:
Segmentation identifies individual objects in the image. Objects in the original image are contiguous areas of the image, that can be distinguished based on some of their properties, e.g. are brighter or dimmer than the surrounding areas. In the segmented image objects are marked with numbers, so the first object consist of pixels of '1', the second pixels of '2'. Possible uses of segmentation in Image Analyst MKII
In the simplest case, binarized images are segmented, defining
objects as contiguous areas of ones (white pixels). This can be
performed by the
![]() Simple
Segmentation function. The
Simple
Segmentation function. The
![]() Advanced
Segmentation function of Image Analyst performs identifies object
being local fluorescence maxima (or minima) and their boundaries are
determined by locally adaptive thresholding, while the separation of
the objects from each other by the Watershed algorithm.
Advanced
Segmentation function of Image Analyst performs identifies object
being local fluorescence maxima (or minima) and their boundaries are
determined by locally adaptive thresholding, while the separation of
the objects from each other by the Watershed algorithm.
When working with an image series (x,y,t or x,y,z), segmentation can be performed frame-by-frame independently, or in 3D identifying the objects that overlap each other frame to frame as the same object. This feature is useful to plot intensities over objects that are moving or changing shape during the time lapse.
Object can be discarded from the segmentation using segmentation
classifiers. In the Image Analyst MKII using the
![]() Set
Segmentation Classifiers function before segmentation will
result in deletion of objects (filling up with zeros) that do not
pass the classifiers.
Set
Segmentation Classifiers function before segmentation will
result in deletion of objects (filling up with zeros) that do not
pass the classifiers.